Skip to content
Art
Info
Events
Blog
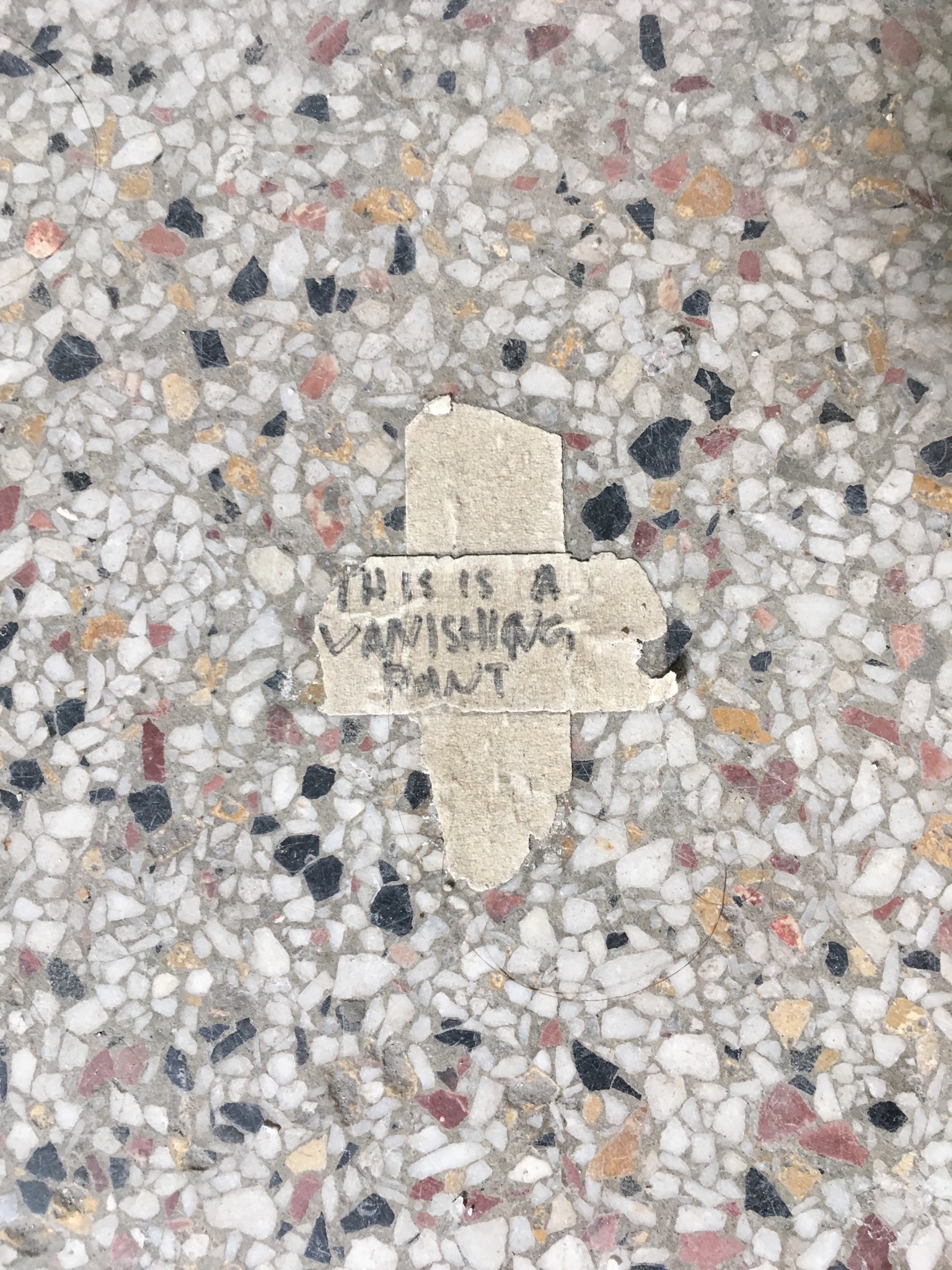
Vanishing Point
Unboxing/Book Categories
It’s finally time to unpack all my books, and interpret their cosmology.
Depth
perception research
Marigold
fun on the flatbed scanner!
Shape Shift
Post navigation
←
Older Blog
WordPress Image Lightbox Plugin